绿软下载站:请安心下载,绿色无病毒!
最近更新热门排行

本地下载文件大小:3.6M
高速下载需优先下载高速下载器
四连杆机构计算软件是一款连杆机构设计小软件,实现给定任意四连杆机构和H点的相对位置,可以模拟出H点的运行坐标。选择了以连杆和摇杆作为设计变量,传动角条件作为约束条件,输出角平方和最小为目标函数,使用多维约束优化函数fmincon对连杆和摇杆的长度进行优化。然后采用修正牛顿切线法和运动误差分析程序对优化后的四连杆机构进行运动误差的分析。
连杆机构构件运动形式多样,如可实现转动、摆动、移动和平面或空间复杂运动,从而可用于实现已知运动规律和已知轨迹。此外,低副面接触的结构使连杆机构具有以下一些优点:运动副单位面积所受压力较小,且面接触便于润滑,故磨损减小;制造方便,易获得较高的精度;两构件之间的接触是靠本身的几何封闭来维系的,它不象凸轮机构有时需利用弹簧等力封闭来保持接触。因此,平面连杆机构广泛应用于各种机械、仪表和机电产品中。平面连杆机构的缺点是:一般情况下,只能近似实现给定的运动规律或运动轨迹,且设计较为复杂;当给定的运动要求较多或较复杂时,需要的构件数和运动副数往往较多,这样就使机构结构复杂,工作效率降低,不仅发生自锁的可能性增加,而且机构运动规律对制造、安装误差的敏感性增加;机构中作复杂运动和作往复运动的构件所产生的惯性力难以平衡,在高速时将引起较大的振动和动载荷,故连杆机构常用于速度较低的场合。
近年来,随着连杆机构设计方法的发展,电子计算机的普及应用以及有关设计软件的开发,连杆机构的设计速度和设计精度有了较大的提高,而且在满足运动学要求的同时,还可考虑到动力学特性。尤其是微电子技术及自动控制技术的引入,多自由度连杆机构的采用,使连杆机构的结构和设计大为简化,使用范围更为广泛。
曲柄摇杆机构按照原动件和从动件的对应关系可知其有5个独立参数,对于图1分别为曲柄长度L1,连杆长度L2,摇杆长度L3,机架长度L4,曲柄初始角φ0和摇杆的初始角Ψ0,由于L1和L4已知,
且由图1的几何关系知:
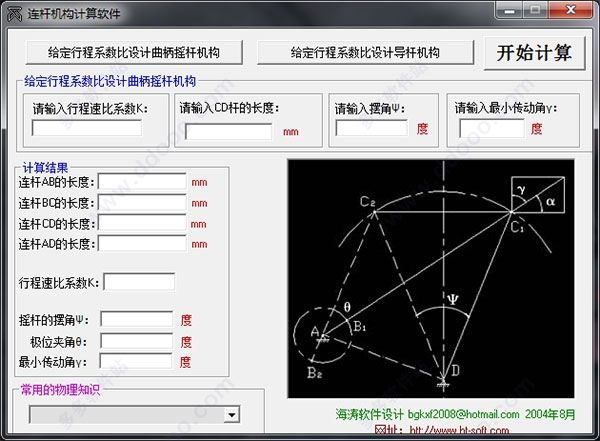

所以φ0和Ψ0已不再是独立参数,而是杆长的函数。经上分析独立变量只有L2和L3。因此,选择连杆长度L2和摇杆长度L3作为设计变量。
即:X = [L2 L3]T= [X1X2]T
 钢结构详图设计软件(Tekla Structures ) 201945588 x64官方版 | 4.20G
钢结构详图设计软件(Tekla Structures ) 201945588 x64官方版 | 4.20G 记乎卡编器(记忆工具)v2.3.0 电脑版 | 62.4M
记乎卡编器(记忆工具)v2.3.0 电脑版 | 62.4M 成长值加倍卡领取软件 | 1M
成长值加倍卡领取软件 | 1M 风清扬查号软件v2.1.0官方版 | 1.2M
风清扬查号软件v2.1.0官方版 | 1.2M CNC机床编程软件ESPRITv2019 R1 官方最新版 | 1.66G
CNC机床编程软件ESPRITv2019 R1 官方最新版 | 1.66G 双色球精算师v1.0破解版 | 11.3M
双色球精算师v1.0破解版 | 11.3M 千牛安全助手v1.0 | 13.6M
千牛安全助手v1.0 | 13.6M Tz快捷助手v1.1绿色版 | 5.3M
Tz快捷助手v1.1绿色版 | 5.3M










 中医运气学软件v4.8免费版
中医运气学软件v4.8免费版 吉祥抽奖软件v3.6.2
吉祥抽奖软件v3.6.2 上海市税务网上电子申报企业端v1.0 官方版
上海市税务网上电子申报企业端v1.0 官方版 南方银河1号机内软件20150525 官方最新版
南方银河1号机内软件20150525 官方最新版 V3Mini布局软件绿色版
V3Mini布局软件绿色版 网站批量检测工具20192019.7.1 最新版
网站批量检测工具20192019.7.1 最新版 Power CardMaker名片制作软件V5.2安装中文版
Power CardMaker名片制作软件V5.2安装中文版 AeroMatrix全自动空三测量软件V7.1.100.1248安装版
AeroMatrix全自动空三测量软件V7.1.100.1248安装版















软件评论 请自觉遵守互联网相关政策法规,评论内容只代表网友观点,与本站立场无关!
网友评论